I am Mingfeng Shang, Ph.D., an Assistant Research Professor in the Department of Civil & Architectural Engineering & Mechanics at the University of Arizona. I serve as Core Faculty with the Center for Applied Transportation Sciences (CATS) and Affiliated Faculty with the Arizona Transportation Institute (AZTI). I earned my Ph.D. from the University of Minnesota in June 2024 under Dr. Raphael E. Stern.
My research focuses on integrating mathematical modeling, control theory, and AI to understand heterogeneous and mixed-autonomy traffic systems, enabling safer, more efficient, sustainable, and cyber-resilient transportation networks.
News 📰
- Oct. 2025: Our project “SPR-798: Statewide Pavement Marking Assessment for Driver-Assist Vehicle Technologies” was successfully kicked off.
- Aug. 2025: Our project “SPR-792: State of the Practice of a Data Management Office Within DOTs” was featured at the 2025 AZTI Summit in Flagstaff and highlighted by UA News.
- May 2025: Presented “Data-Driven Classification of Vehicle Driving Behavior in Mixed Traffic Using Car-Following Trajectories” at the Transportation Research Symposium (TRS) 2025, Rotterdam, The Netherlands.
- May 2025: Honored with the Intelligent Transportation Society (ITS) Arizona 2025–26 Young Professional Scholarship.
Research 🔬
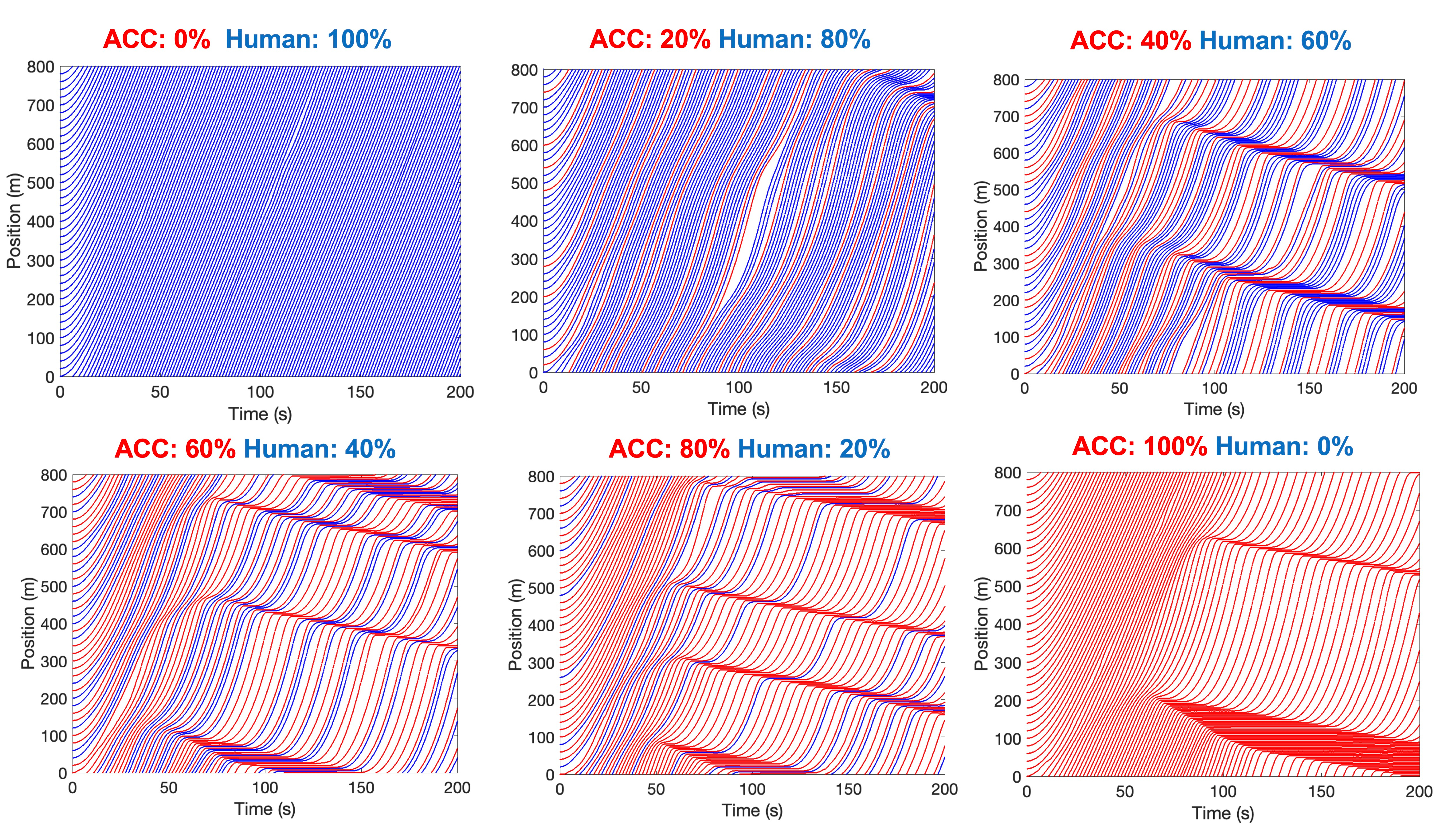
1. Modeling & Simulation in Mixed Autonomy Traffic
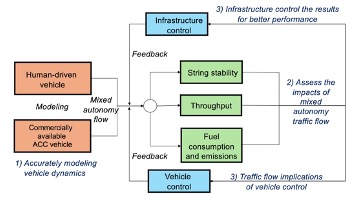
- Developed physically interpretable car-following models calibrated with real trajectory data.
- Showed how AV penetration rates impact string stability, throughput, fuel use, and emissions in mixed traffic.
- Results published in IEEE T-ITS, IEEE T-IV, and Transportation Research Part C.
2. Infrastructure Control in Mixed Autonomy Traffic
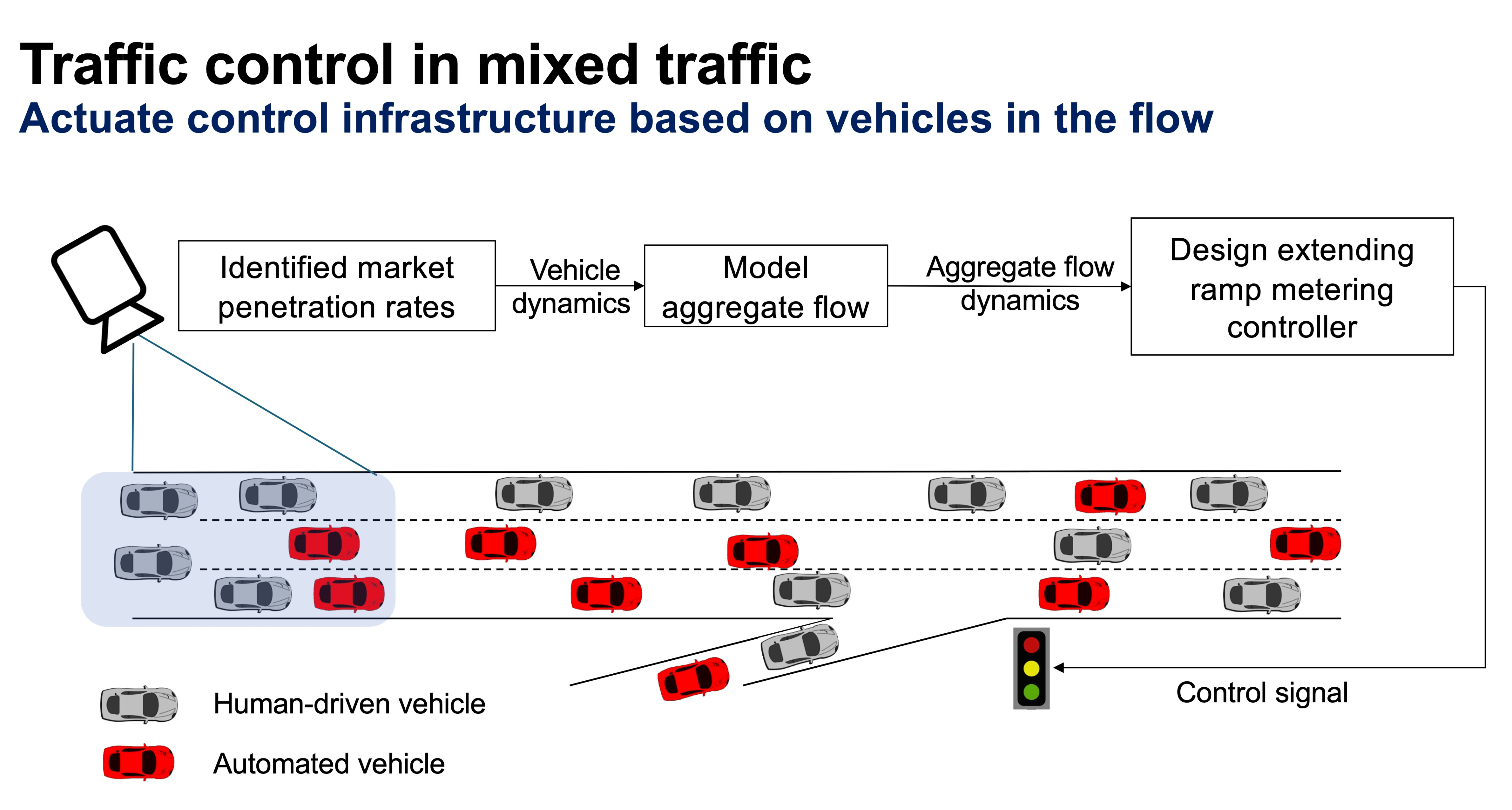
- Built macro–micro flow models linking car-following dynamics to network-level performance.
- Designed next-generation ramp metering strategies for mixed autonomy traffic.
- Demonstrated a 36% improvement in ramp metering effectiveness compared to traditional control strategies.
3. AI for Sustainable Transportation Systems
- Co-PI and led a group on a statewide project examining transportation electrification and air quality in Arizona.
- Designed a multi-stage AI framework to classify AVs, EVs, and human-driven vehicles from trajectory data.
- Leveraged Generative Adversarial Networks (GANs) to address data imbalance.
Journal Publications 📚
- Shang, M., Wang, S., Stern, R. A two-condition continuous asymmetric car-following model for adaptive cruise control vehicles.
IEEE Transactions on Intelligent Vehicles, 2024. - Shang, M., Wang, S., Stern, R. Extending ramp metering control to mixed autonomy traffic flow with varying degrees of automation.
Transportation Research Part C, 2023. - Shang, M., Rosenblad, B., Stern, R. A novel asymmetric car-following model for driver-assist enabled vehicle dynamics.
IEEE Transactions on Intelligent Transportation Systems, 2022. - Shang, M., Stern, R. Impacts of commercially available adaptive cruise control vehicles on highway stability and throughput.
Transportation Research Part C, 2021. - Li, T., Shang, M., Wang, S., Stern, R. Detecting subtle cyberattacks on adaptive cruise control vehicles: A machine learning approach.
IEEE Open Journal of Intelligent Transportation Systems, 2024. - Wang, S., Shang, M., Stern, R. Analytical characterization of cyberattacks on adaptive cruise control vehicles.
IEEE Transactions on Intelligent Transportation Systems, 2024. - Wang, S., Shang, M., Levin, M., Stern, R. A general approach to smoothing nonlinear mixed traffic via control of autonomous vehicles.
Transportation Research Part C, 2023. - Jeon, H., Benekohal, R., Garshasebi, B., Shang, M. Comparison of an adaptive signal system to a time-based coordination plan along a signalized arterial.
Advances in Transportation Studies, 2022. - Levin, M., Shang, M., Stern, R. Effects of short-term travel on COVID-19 spread: A novel SEIR model and case study in Minnesota.
PLOS ONE, 2021.
Sponsored Projects 📝
SPR-798: Statewide Pavement Marking Assessment for Driver-Assist Vehicle Technologies
Role: Principal Investigator (PI)
Sponsor: Arizona Department of Transportation (ADOT)Objective: This project aims to evaluate ADOT’s current pavement-marking practices, identify gaps related to driver-assist technology needs, and develop updated design, assessment, and maintenance guidelines that enhance safety, visibility, and long-term performance for both human drivers and automated systems.
SPR-792: State of the Practice of a Data Management Office Within DOTs
Role: Principal Investigator (PI)
Sponsor: Arizona Department of Transportation (ADOT)Impact of Transportation Electrification on Air Quality and Health in Arizona
Role: Co-PI
Sponsor: University of Arizona, Technology and Research Initiative Fund (TRIF)Pilot Study of Connected Vehicle Applications to Enhance Incident Response and Roadway Safety
Role: Co-PI
Sponsor: City of Phoenix
Teaching and Mentoring 👨🏫
Instructor at the University of Arizona
- Fall 2025: CE 363: Transportation Engineering and Pavement Design
- Fall 2024: CE 463/563: Traffic Flow and Capacity Analysis
Students Co-Advised with Dr. Yao-Jan Wu at the University of Arizona
Dissertation Title: Enhanced Assessment of Intelligent Traffic Control Devices for Vehicle and Pedestrian Safety
Connect with me 😊
I enjoy collaborating with colleagues, agencies, and students on advancing safer, smarter, and more sustainable transportation systems.
If you’re interested in partnerships, projects, or just exchanging ideas, I’d be glad to connect.
Research Collaborations
Welcome opportunities to co-develop research projects and grant proposals that connect academic insights with real-world impact.
Talks & Engagements
Available for invited talks, workshops, and guest lectures that bridge research with real-world applications in mobility, data, and infrastructure.
Get in Touch
Feel free to reach out anytime:
- Email: mfshang at arizona dot edu